PID
PID控制器是工业过程控制中广泛采用的一种控制器,其中,P、I、D分别为比例(Proportion)、积分(Integral)、微分(Differential)的简写; 将偏差的比例、积分和微分通过线性组合构成控制量,用该控制量对受控对象进行控制,称为PID算法。 其中KP、KI、KD分别为比例系数、积分系数、微分系数。
简介
P表示正比例项。比例控制器的输出u(t)与输入偏差e(t)成正比,能迅速反映偏差,从而减小偏差,但不能消除稳态误差。 稳态误差是指系统控制过程趋于稳定时,给定值与输出量的实测值之差。 偏差存在,才能使控制器维持一定的控制量输出,因此比例控制器必然存在着稳态误差。 由偏差理论知,增大比例虽然可以减小偏差,但不能彻底消除偏差。比例控制作用的大小除与偏差e(t)有关之外,还取决于比例系数Kp的大小。 比例系数Kp越小,控制作用越小,系统响应越慢;反之,比例系数Kp越大,控制作用也越强,则系统响应越快。 但是,Kp过大会使系统产生较大的超调和振荡,导致系统的稳定性能变差。 P=Kp*△ △表示目标值与当前值的误差。
I表示积分项 积分作用的强弱,取决于积分时间常数Ti,Ti越大积分作用越弱,反之则越强。 积分控制作用的存在与偏差e(t)的存在时间有关,只要系统存在着偏差,积分环节就会不断起作用。 在积分时间足够的情况下,可以完全消除稳态误差,这时积分控制作用将维持不变。Ti越小,积分速度越快,积分作用越强。 积分作用太强会使系统超调加大,甚至使系统出现振荡。 I=Ki*(△0+△1+△2+△3….)
D表示微项分,表示误差的变化速率。通过微分可解决震荡问题。 微分环节有助于系统减小超调,克服振荡,加快系统的响应速度,减小调节时间,从而改善了系统的动态性能,但微分时间常数过大,会使系统出现不稳定。 微分作用不能消除稳态误差,单独使用意义不大,一般需要与比例、积分控制作用配合使用,构成PD或PID控制。 D=Kd*((△2-△1)/dt) dt表示检测时间的间隔。比如每秒检测一次,(△2-△1)表示上一次检测的误差与本次检测误差的差值。
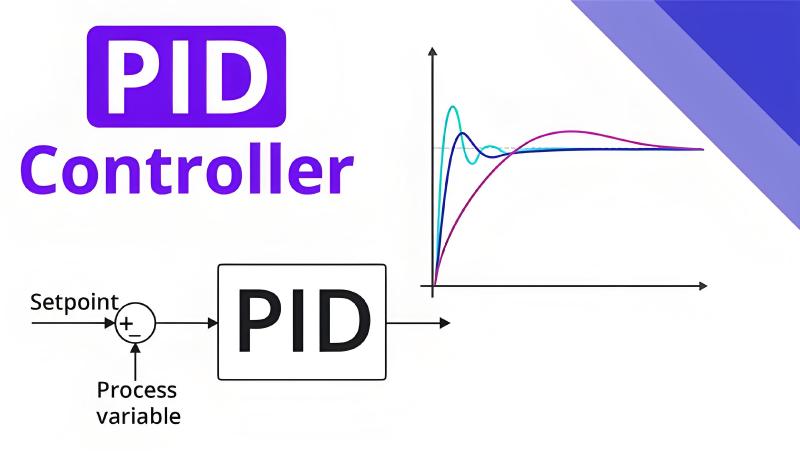
对于PID控制,在控制偏差输入为阶跃信号时,立即产生比例和微分控制中作用。 由于在偏差输入的瞬时,变化率非常大,微分控制作用很强,此后微分控制作用迅速衰减,但积分作用越来越大,直至最终消除稳态误差。 PID控制综合了比例、积分、微分3种作用,既能加快系统响应速度、减小振荡、克服超调,亦能有效消除稳态误差,系统的静态和动态品质得到很大改善, 因而PID控制器在工业控制中得到了最为广泛的应用。
手动调节PID
先调Kp,Ki=0,Kd=0。始终无法到达设定值再加上Ki。当在设定值上下震荡时,再调Kd。
口诀
参数整定找最佳,从小到大顺序查, 先是比例后积分,最后再把微分加, 曲线振荡很频繁,比例度盘要放大, 曲线漂浮绕大湾,比例度盘往小扳, 曲线偏离回复慢,积分时间往下降, 曲线波动周期长,积分时间再加长, 曲线振荡频率快,先把微分降下来, 动差大来波动慢,微分时间应加长, 理想曲线两个波,前高后低4比1。
调整方式 上升时间 超调量 安定时间 稳态误差 稳定性 ↑Kp ↓减小 ↑增加 ↑小幅增加 ↓减少 ↓变差 ↑Ki ↓小幅减小 ↑增加 ↑增加 ↓↓大幅减少 ↓变差 ↑Kd ↓小幅减小 ↓减小 ↓减小 →变化不大 ↑变好
总结
通俗的讲,Kp比例条件相当于粗调,积分Ki是精调,把积分时间调到很大(10万),此时积分调节不再起作用。 当比例调节完成后。把比例调节为之前的80%, 然后有大到小调节积分时间。 微分的作用属于超前调节,预测误差变化趋势,提前抑制误差。 微分控制的重点不在于实际测量值的具体数值,而在其变化的方向和速度。 但局限性,如果测量信号不是很“干净”,存在毛刺干扰,会产生很多不必要甚至错误的控制信号,慎用微分。 但可以改善系统的响应速度和稳定性,对具有滞后性的被控对象,应加入微分环节。 微分时间越大,作用越强。为0时,作用为0